
In the horticultural world, some vines are especially grabby. As they grow, the woody tendrils can wrap around obstacles with enough force to pull down entire fences and trees.
Inspired by vines’ twisty tenacity, engineers at MIT and Stanford University have developed a robotic gripper that can snake around and lift a variety of objects, including a glass vase and a watermelon, offering a gentler approach compared to conventional gripper designs. A larger version of the robo-tendrils can also safely lift a human out of bed.
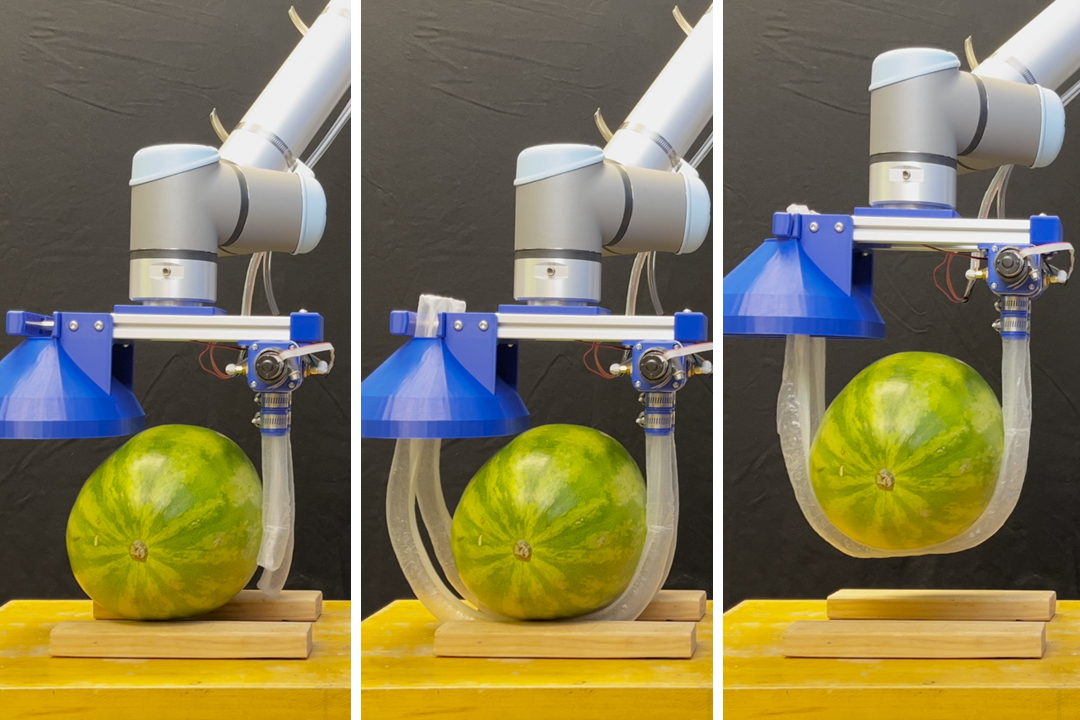
The new bot consists of a pressurized box, positioned near the target object, from which long, vine-like tubes inflate and grow, like socks being turned inside out. As they extend, the vines twist and coil around the object before continuing back toward the box, where they are automatically clamped in place and mechanically wound back up to gently lift the object in a soft, sling-like grasp.
The researchers demonstrated that the vine robot can safely and stably lift a variety of heavy and fragile objects. The robot can also squeeze through tight quarters and push through clutter to reach and grasp a desired object.
The team envisions that this type of robot gripper could be used in a wide range of scenarios, from agricultural harvesting to loading and unloading heavy cargo. In the near term, the group is exploring applications in eldercare settings, where soft inflatable robotic vines could help to gently lift a person out of bed.
“Transferring a person out of bed is one of the most physically strenuous tasks that a caregiver carries out,” says Kentaro Barhydt, a PhD candidate in MIT’s Department of Mechanical Engineering. “This kind of robot can help relieve the caretaker, and can be gentler and more comfortable for the patient.”
Barhydt, along with his co-first author from Stanford, O. Godson Osele, and their colleagues, present the new robotic design today in the journal Science Advances. The study’s co-authors are Harry Asada, the Ford Professor of Engineering at MIT, and Allison Okamura, the Richard W. Weiland Professor of Engineering at Stanford University, along with Sreela Kodali and Cosmia du Pasquier at Stanford University, and former MIT graduate student Chase Hartquist, now at the University of Florida, Gainesville.
Open and closed

Leave a Reply